touchAttachment
From SmartBots Developers Docs
Touches an attachment of the bot (HUD or wearable object)
Bot.touchAttachment(objectName, linkNumber);
Reference
This command accepts the following parameters:
| Variable | Required | Description
| |
|---|---|---|---|
| Input: | |||
| objectName | yes | The name of the object to touch. | |
| linkNumber | yes | The link number of the prim (root prim = 1) | |
| Output: | |||
| Function returns a Promise with the following data: | |||
| success | bool | true if command completed successfully | |
| error | string | error string if command has failed | |
Return value
- If object is not found, bot returns result.success=false and error message in result.error (use .then(function(result) to catch this).
- If linkNumber is wrong (less than 1 or more than number of child prims), function returns a success but no touch happens.
Comments
Remember that bot have to load all objects from SL before touching them. So:
- after logging in, give bot about 30 seconds to load surrounding objects,
- the same after teleporting.
Determining the link number
The root prim is always 1 (so, linkNumber=1 for 1-prim objects too).
To get the link number of the specific child prim use Phoenix Firestorm viewer:
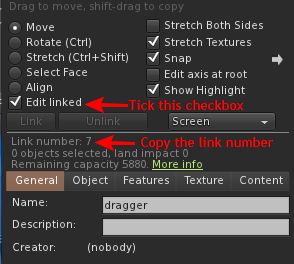
- Start editing your object
- Check "Edit linked" option
- Select required child prim
- See the "Link number" value
Examples
Touch a special test attachment object (contact SmartBots support to get it):
// Touch the button of the "Touch tester v2.0" object:
Bot.touchAttachment("Touch tester v2.0", 2);
// Gracefully exit since we're done
exit();